کالیبراسیون کامپیوتر مدل ترافیک شبیه سازی خرد با شبکه های عصبی


24,500 تومانشناسه فایل: 9355
مقدمه مقاله
عملکرد یک سیستم ترافیک تحت تاثیر جنبه های مختلف رفتار انسانی است (اونیوا، میلانز، ویلگارا، پرز و گودوی، 2012). مطالعات نشان می دهد که رفتار ترافیکی شرکت کنندگان، در میان چیزهای دیگر، به طور منطقه ای و به طور فرهنگی شرطی شده است (اولستام و تاپانی، 2004).
مدل های شبیه سازی خرد شامل رفتار مختلف رانندگان در سطحی از هر موجودیت خاص است، و درستی نتایج مدل سازی بستگی به انتخاب اولیه مدل (فنگ و الفتریادو، 2005) و موفقیت در روند کالیبراسیون (عضو هیئت حمل و نقل [Transportation Research Bord] ، 2000) دارد.
کالیبراسیون مدل ترافیــک در واقع یک تنظیم از یک مدل برای یک شبکه خاص ترافیک محلی و اعضای آن می باشد. کالیبراسیون به عنوان فرآیند مقایسه و به حداقل رسانی تفاوت بین نتایج مدل سازی و داده های واقعی به دست آمده از شمارش و اندازه گیری در شبکه های محلی (عضو هیئت حمل و نقل، 2000) تعریف می شود. اعتبــار سنجی مدل برآوردی موفقیت آمیز از کالیبراسیــــون مدل ساخته شده از طریق مقایسه شاخص های به دست آمده از مدل کالیبره شده و آن هایی که در ترافیک اندازه گیری شده اند می باشد.
تجزیه و تحلیل های نوسان های فضایی و زمانی بزرگتر از یک شبکه ترافیکی و پیش بینی یک حالت آینده هر دو نیاز به تعداد بیشتری از مدل ها دارد، از جمله مدل های تقاضای ترافیک (اتما، آرنتزه، و تیمرمانس، 2011)، توزیع ترافیک پویا (فلوترود، چن و ناگل، 2012)، تحرک روزانه (فلوترود، بیرلایر، و ناگل، 2011)، جریان پیش بینی در شرایط ترافیک معمولی و غیر معمولی (کاسترو- نتو، جونگ، جونگ، و هان، 2009) و غیره.
این واقع بینانه است که انتظار داشت که مدل سازی انتخابی یک حالت سفر و مسیرهای کاربران به مدل سازی ترافیک (پارک و کیم، 2001؛ ریکرت و ناگل، 2001) شاخص های اقتصادی و زیست محیطی، هر دو برای مدل سازی زمان واقعی و برای پیش بینی تقاضای ترافیک در آینده و عواقب آن مربوط است.
میزان قابل اعتماد بودن نتایج حاصل از مدل سازی یک حالت آینده از سیستم موضوع مورد بحث است (دوروتی، آمبادیپودی، و کیل، 2006؛ استوانویک و مارتین، 2008)، اما تلاش های علمی به سمت پذیرش معیارهای قابل اعتماد در ابزار انتخاب در فرایندهای برنامه ریزی و بهینه سازی هدایت می شود. پیش بینی انتخاب مسیرهای کاربران در سطح شبیه سازی خرد (فلوترود و همکاران، 2011) و کالیبراسیون مدل توزیع ترافیک را شامل نمی شود.
در این مقاله، انتخاب مسیرهای کاربران، که در توزیع ترافیکی در یک بخش مورد بررسی از ترافیک شبکه می باشد، یک کاربر پارامتر ورودی تعریف شده از مدل شبیه سازی خرد است. هدف این مقاله به دست آوردن یک مدل شبیه سازی خرد کالیبره شده می باشد که قادر به دریافت ارتباط خوب با ویژگی های عملکردی اندازه گیری شده از یک بخش خاص شبکه در شرایط ترافیک واقعی است.
الگوریتم ژنتیکی (GA) معمولاً از الگوریتم کالیبراسیون برای پارامترهای ورودی مدل شبیه سازی استفاده می شود. تجربیات بهره برداری مثبت از GA در مثال زیر گزارش شده است: در کالیبراسیون مدل FRESIM (چو، جین، نگ، نگ، و اسرینیواسان، 1998)، مدل PARAMICS، مدلVISSIM و مدل CORSIM (پارک، وان، و یون، 2006) و در کالیبراسیون مدل VISSIM (کیم، 2006).
تجزیه و تحلیل شکاف زمانی قابل قبول و تعیین فاصله زمانی بحرانی با استفاده از مدل Greenshields (سیسو، ایلوتا، بارد، و ایسبرانز، 2011) نشان دهنده یک توصیفی از روش کالیبراسیون مدل شبیه سازی خرد VISSIM در میدان در نیویورک است.
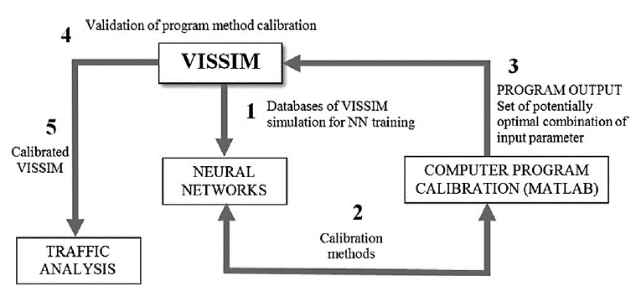
به منظور کالیبراسیون کردن ییک مدل ترافیک شبیه سازی خرد ، یک روش کالیبراسیون جدید تجزیه و تحلیل شد. در این مقاله نتایج به دست آمده با استفاده از شبکه های عصبی در فرآیند کالیبراسیون مدل ترافیک شبیه سازی خرد نشان داده می شود.
اولین شاخص ترافیک، انتخاب در فرآیند کالیبراسیون، زمان سفر بین نقاط اندازه گیری شده است. نقاط اندازه گیری در محیط واقعی انتخاب شده و به موضوعات موجود مربوط شدند – یک قطب نور در آغاز بخش و یک قطب تامین برق در پایان، به دلیل آسان تر شدن ورود آن ها در مدل طرح بندی آن روش. زمان سفر در این حوزه به راحتی قابل اندازه گیری است، و آن تحت تاثیر زمان واکنش راننده متغیر می باشد.
در این مقاله، میانگین زمان سفر به منظور آزمودن پاسخ شبکه های عصبی برای شاخص معین استفاده می شود. علاوه بر این، یکی دیگر از شاخص ترافیک به راحتی قابل اندازه گیری است – پارامترهای صف – در فرآیند کالیبراسیون معرفی شده اند. اعتبار سنجی برای زمان سفر و پارامترهای صف برای مجموعه های جدیدی از داده های اندازه گیری شده انجام می شود.
یافته های حاصل از مقایسه داده های مدل سازی شده و اندازه گیری شده از مدل ترافیک شبیه سازی خرد، برای یک میدان کالیبره شده، نیز نشان داده شده است، و اعتبار سنجی در میدان دیگری انجام شد.
پیش بینی زمان سفر، به دست آمده با استفاده از شبکه های عصبی (پارک و همکاران، 1999، دیا، 2001) را می توان در یک چارچوب گسترده تری از مدل سازی ترافیک تجزیه و تحلیل کرد، اما تاکید ویژه، در این مورد، استفاده در مدل سازی شبیه سازی خرد است.
مدل شبیه سازی خرد ، برای بررسی کاربرد شبکه های عصبی در فرایند کالیبراسیون انتخاب می شود، VISSIM است. تجزیه و تحلیل ها بر اساس نتایج به دست آمده از شبیه سازی ترافیک یک ساعت، که مربوط به طول مدت جمع آوری داده ها در جوزه برای هر مجموعه ای از داده های اندازه گیری شده در شرایط ترافیک واقعی است، انجام می شود.
ABSTRACT Calibration of microsimulation traffic model using neural network approach
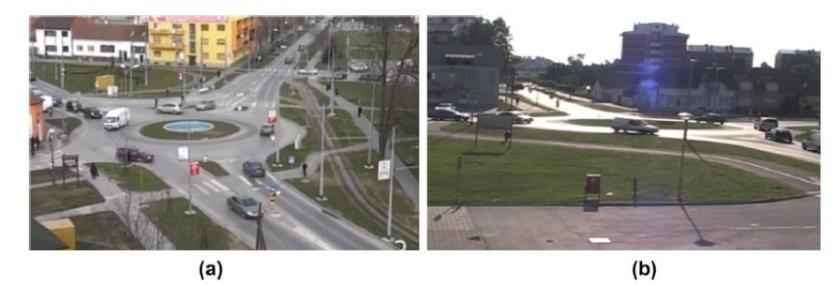
This paper presents the results of research on the applicability of neural networks in the process of computer calibration of a microsimulation traffic model. VISSIM microsimulation model is used for calibration done at the example of roundabouts in an urban area. The calibration method is based on the prediction of a neural network for one traffic indicator, i.e. for the traveling time between measuring points. Besides the traveling time, the calibration process further/also involves a comparison between the modeled and measured queue parameters at the entrance to the intersection. The process of validation includes an analysis of traveling time and queue parameters on new sets of data gathered both at the modeled and at a new roundabout. A comparison of the traffic indicators measured in the field and those simulated with the calibrated and uncalibrated microsimulation traffic model provides an insight into the performance of the calibration procedure.
Introduction
The functioning of a traffic system is under the influence of various aspects of human behavior (Onieva, Milanés, Villagrá, Pérez, & Godoy, 2012). Studies show that the behavior of traffic participants is, among other things, territorially and culturally conditioned (Olstam & Tapani, 2004). Microsimulation models include variable behavior of drivers at a level of each particular entity, and the reality of modeling results depends on the initial choice of the model (Fang & Elefteriadou, 2005) and success of the calibration process (Transportation Research Bord, 2000).
Calibration of a traffic model is actually an adjustment of a model to a specific local traffic network and its users. Calibration is defined as the process of comparing and minimizing the differences between the modeling results and the real data obtained by counting and measuring in the local network (Transportation Research Bord, 2000). Validation of the model is an estimate of the success of the model calibration made through a comparison of indicators obtained from the calibrated model and the ones measured in traffic.
Analysis of bigger spacial and time scopes of a traffic network and prediction of a future state both need a larger number of models, including traffic demand models (Ettema, Arentze, & Timmermans, 2011), dynamic traffic distribution (Flötteröd, Chen & Nagel, 2012), daily mobility (Flötteröd, Bierlaire, & Nagel, 2011), flow prediction under typical and atypical traffic conditions (Castro-Neto, Jeong, Jeong, & Han, 2009) etc. It is realistic to expect that modeling of the selection of a travel mode and users’ routes is connected with the modeling of traffic (Park & Kim, 2001; Rickert & Nagel, 2001), economic and environmental indicators, both for real time modeling and for the prediction of the future traffic demand and its consequences. The degree of reliability of results of modeling a future state of the system is a subject to a debate (Dorothy, Ambadipudi, & Kill, 2006; Stevanovic´ & Martin, 2008), but scientific efforts are directed towards an adoption of reliability criteria in selecting tools in planning and optimization processes.
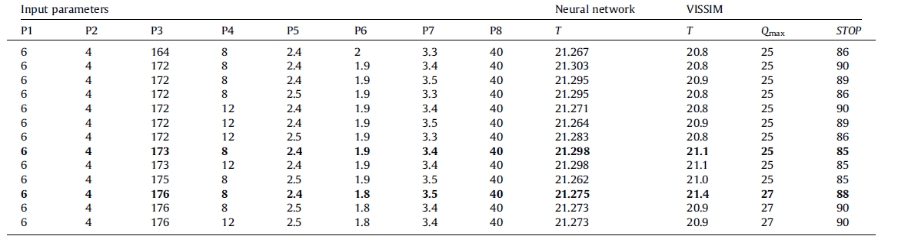
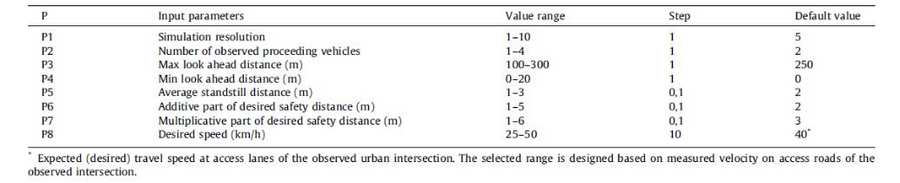
Prediction of selection of users’ routs on the microsimulation level (Flötteröd et al., 2011) and calibrations of traffic distribution model are not included. In this paper, the selection of users’ routs, which is the traffic distribution in an examined segment of the traffic network, is a user defined input parameter of the microsimulation model. The aim of this paper is to obtain a calibrated microsimulation model which is able to give good correlation with measured functional characteristics of a particular segment of the network in real traffic conditions.
Genetic algorithm (GA) is the most commonly used calibration algorithm for input parameters of the simulation model. Positive utilization experiences of GA are reported in the following examples: in the calibration of FRESIM model (Cheu, Jin, Ng, Ng, & Srinivasan, 1998), PARAMICS model, VISSIM and CORSIM model (Park, Won, & Yun, 2006) and in the calibration of a VISSIM model (Kim, 2006). Analysis of acceptable time gaps and determination of a critical time interval by means of Greenshields’ model (Cicu, Illotta, Bared, & Isebrands, 2011) represent a description of the calibration method of the VISSIM microsimulation model at roundabouts in New York.
For the purpose of calibrating a microsimulation traffic model, a new calibration method is analyzed. This paper shows results obtained by applying neural networks in the microsimulation traffic model calibration process.
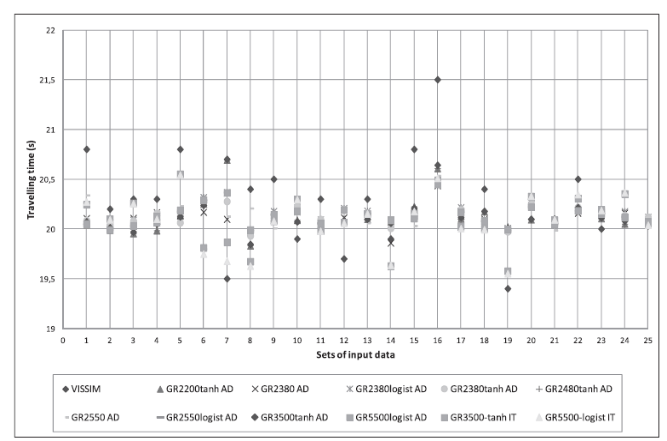
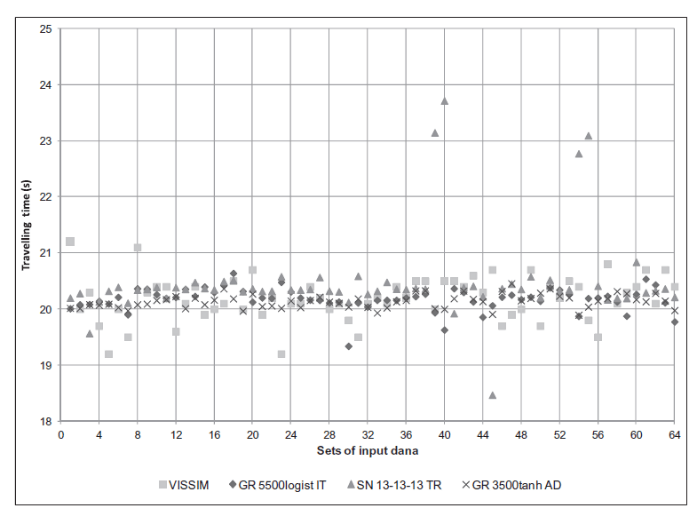
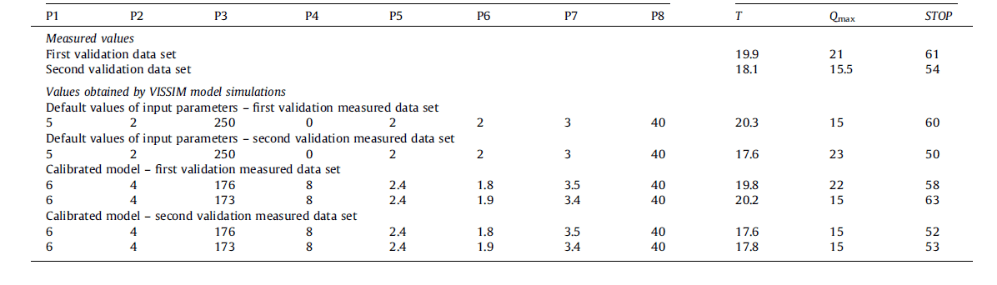
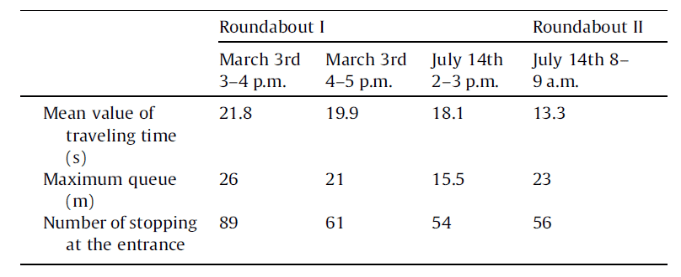
The first traffic indicator, chosen in the calibration process, is the traveling time between measuring points. Measuring points were chosen in the real environment and connected to existing objects – a light pole at the beginning of the section and an electric supply pole at the end, because it was easier to enter them into the model layout that way. The traveling time is easily measurable in the field, and it is under the influence of the variable driver’s reaction time. In this paper, the mean traveling time is used in order to test the response of neural networks for the given indicator.
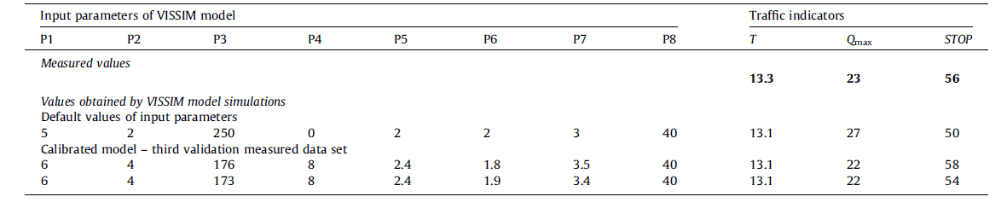
Furthermore, another easily measurable traffic indicator – queue parameters – is introduced in the calibration process. Validation is done for the traveling time and queue parameters for new sets of measured data. The findings of the comparison of modeled and measured data of the microsimulation traffic model, calibrated to one roundabout, are also shown, and the validation is done on another roundabout.
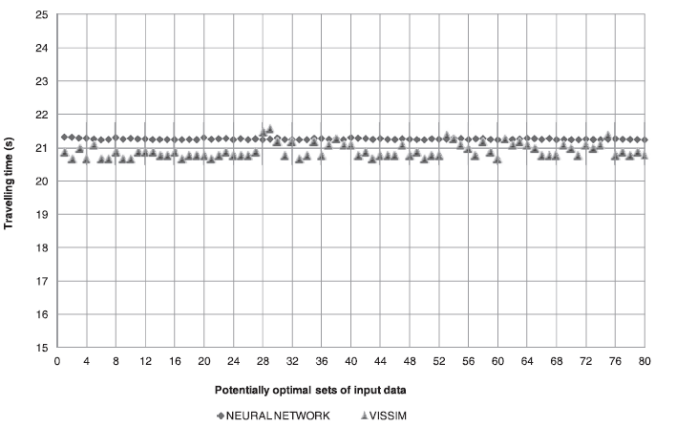
Prediction of traveling time, obtained by application of neural network (Park et al., 1999; Dia, 2001) can be analyzed in a broader context of traffic modeling, but a special emphasis is, in this case, used in microsimulation modeling.
The microsimulation model, selected to investigate the applicability of neural networks in the calibration process, is the VISSIM.1 Analyses are performed on the basis of results obtained by one-hour traffic simulations, corresponding to the duration of the data gathering in the field for every set of data measured in real traffic conditions.


- مقاله درمورد کالیبراسیون کامپیوتر مدل ترافیک شبیه سازی خرد با شبکه های عصبی
- پروژه دانشجویی کالیبراسیون کامپیوتر مدل ترافیک شبیه سازی خرد با شبکه های عصبی
- کاربرد شبکه های عصبی در کالیبراسیون مدل ترافیک شبیه سازی
- پایان نامه در مورد کالیبراسیون کامپیوتر مدل ترافیک شبیه سازی خرد با شبکه های عصبی
- تحقیق درباره کالیبراسیون کامپیوتر مدل ترافیک شبیه سازی خرد با شبکه های عصبی
- مقاله دانشجویی کالیبراسیون کامپیوتر مدل ترافیک شبیه سازی خرد با شبکه های عصبی
- کالیبراسیون کامپیوتر مدل ترافیک شبیه سازی خرد با شبکه های عصبی در قالب پاياننامه
- پروپوزال در مورد کالیبراسیون کامپیوتر مدل ترافیک شبیه سازی خرد با شبکه های عصبی
- گزارش سمینار در مورد کالیبراسیون کامپیوتر مدل ترافیک شبیه سازی خرد با شبکه های عصبی
- گزارش کارورزی درباره کالیبراسیون کامپیوتر مدل ترافیک شبیه سازی خرد با شبکه های عصبی