ناوبری با استفاده از روش پانل بلادرنگ برای اجرای کنترل ساخت ربات

14,500 تومانشناسه فایل: 5969
چکیده
در این مقاله، محاسبات جریان پتانسیل برای جریان سیال تراکم ناپذیر برای ایجاد یک الگوریتم ناوبری آزاد برخورد برای یک مجموعه ربات قرار می شود. ربات ها به اسکنرهای لیزری که برای تشخیص موانع محیط استفاده می شوند، مجهز شده اند. سپس، یک روش پانل بلادرنگ برای محاسبه خطوط جریان پتانسیل اطراف اشیا سخت با شکل های پیچیده استفاده می شود، که روبات ها را با مسیرهای امن به هدف هدایت می کند. همچنین ربات ها مجبور می شوند که در طی ناوبری با استفاده از توابع پتانسیل، یک ساختار مورد نظر را حفظ کند. الگوریتم های جریان پتانسیل، ناوبری را با مسیر مسطح و صاف برای جستجو تا هدف فراهم می کنند. الگوریتم می تواند در محیط های پویا به صورت بلادرنگ به کار گرفت تا تغییرات واسطه ها شناسایی شود.
مقدمه مقاله
جریان های پتانسیل دارای خواص ذاتی نظیر خطوط جریان مسطح است که با یکدیگر یا با اشیا محیط برخورد نمی کنند. علاوه بر این، آنها به اندازه سایر روش های توابع پتانسیل از مشکل حداقل نسبی رنج نمی برند. بنابراین، آنها برای طراحی و جستجوی مسیر بدون برخورد در ربات ها، وسایل زمینی و زیردریایی یا پهپادها (UAV’s) مناسب هستند. درک این پتانسیل، تحقیقات جدیدی با استفاده از جریان های پتانسیل صورت گرفته است. یک روش که از توابع جریان جهت ایجاد مسیرهای مناسب برای یک وسیله شبه هواپیما استفاده می کند در [1] توسعه داده شده است. آنها راه حل تحلیلی برای مواردی ارائه می کنند که در آن یک مانع دایره ای ثابت یا حرکتی در محیط وجود دارد. در مورد موانع دایره ای چندگانه، چون راهکار تحلیلی قابل ردیابی نیست در نتیجه هر مانع را به طور جداگانه در نظر می گیرند. این الگوریتم بر روی پلتفرم آزمایشی RoboFlag / Robocup آزمایش شده است و نتایج امیدوار کننده ای نشان می دهد. سالیوان و همکاران در [2] از روشی مشابه برای ایجاد یک الگوریتم جستجو برای گروهی از UAV های در حال پرواز استفاده می کنند. آن ها علاوه بر توابع جریان از نیروهای جهش بالقوه و مجازی برای حفظ یک تشکل از پیش تعیین شده برای گروه ربات ها استفاده می کنند. یه و همکاران در [3] درباره روش مشابهی برای گروهی از ربات ها بحث می کنند. کنترل حرکتی هماهنگ شده برای گروه ربات ها با استفاده از نیروهای بین عاملی مصنوعی تضمین شده است در حالی که جستجوی ایمن با استفاده از توابع جریان تقویت شده با توابع پتانسیل دافع مبتنی بر پرهیز از برخورد با مانع ارائه شده است. علاوه بر این، آن ها درباره مشکل نقطه ایستایی بحث می کنند و یک راهکار تحلیلی مبتنی بر هیدرودینامیک را ارائه می کنند. آن ها یک الگوریتم ارتباطی واقعی تر را با قواعد ارتباطی یکتا در نظر می گیرند و با استفاده از شبیه سازی آن را آزمایش می کنند. علاوه بر این، یک محیط آزمایش برای پیاده سازی های آزمایشی آینده تست شده است.
ABSTRACT Implementation of Robot Formation Control and Navigation Using Real-Time Panel Method
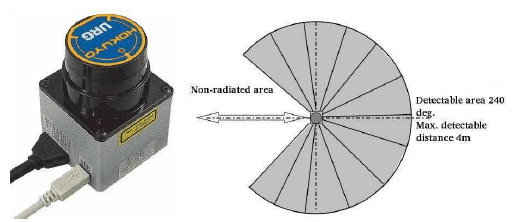
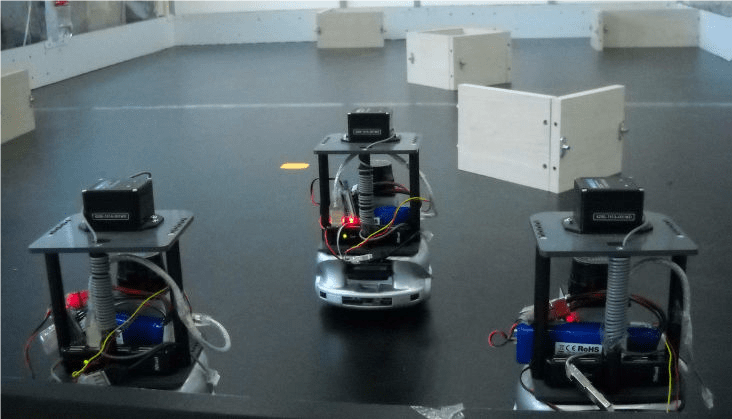
In this paper, potential flow calculations for incompressible inviscid flows are used to develop a collision free navigation algorithm for a robot swarm. Robots are equiped with laser scanners which are used to detect the obstacles in the environment. Then, a real-time panel method is used to calculate the streamlines of the potential flow around the complex shaped rigid objects, providing the robots with safe trajectories to the target. The swarm of robots is also forced to keep a desired formation during navigation using potential functions. Potential flow algorithms provide navigation with smooth paths to the target. The algorithm can be used in dynamic environments in real-time as the changes in the medium are detected.
Introduction
Potential flows have inherent properties such as smooth streamlines which do not cross each others or the objects in the environment. Moreover, they do not suffer from the local minima problem to the same extend as the other potential functions methods. Therefore, they are suitable for collision free path planning and navigation in robots, ground and marine vehicles, or unmanned air vehicles (UAV’s). Realizing this potential, there have been recent investigations using potential flows. A method that uses stream functions to produce paths convenient for an aircraft-like vehicle is developed in [1]. They provide analytical solution for the case in which there is a single stationary or moving circular obstacle in the environment. In the case of multiple circular obstacles since analytical solution is not tractable, they treat each obstacle separately. The algorithm is tested on RoboFlag/Robocup experimental platform showing promising results. In [2] Sullivan et al. use similar procedure to develop a navigation algorithm for a group of flying UAV’s. In addition to the stream functions they use virtual spring forces to maintain a predefined formation for the robot group. In [3] Ye et al. discuss a similar procedure for a swarm of robots. The coordinated motion control for the robot swarm is guaranteed by using artificial inter-agent forces, while safe navigation is provided using stream functions augmented with repulsive potential functions based obstacle avoidance. Moreover, they discuss the stagnation point problem and a hydrodynamics based analytical solution is provided. In a consider a more realistic connectivity algorithm with different singular association rules and test it using simulation. In addition, a testbed for future experimental implementations is discussed. To the best of our knowledge the first work using panel method for robot navigation is the paper of Kim and Khosla [5]. There, the authors first build an artificial potential field using the flowlines found using panel method with harmonic functions. The authors use real shaped obstacles discretized with panels and sink or source singularities are placed at each panel to express the rigid boundary of the obstacles. The stagnation point problem is also stated and defined, and two solutions are suggested. After that, a control strategy for collision-free navigation of a nonpoint robot or a manipulator in this artificial field is developed. Also, two solutions are stated for the structural local minimum problem that occurs in mobile robots and manipulators unable to be considered as point robots. Another pioneering study on using potential flows as well as the panel method for robot or UAV navigation is the work by Zhang and Valavanis [6], [7]. In [6], panel method is used to generate a collision free path for mobile robots navigating in an uncertain obstacle filled 2-D environment. To minimize the complexity they fit simple larger convex polygons to the obstacles (which are not necessarily in the same shape as the obstacle). The panel method is applied to calculate the flow lines to form safe trajectories for the robots to reach the target. They consider also a dynamic environment in which at each instance the panel method is used to solve for the flow lines based on the data sensed from the environment and generate a sequence of way-points. The algorithm is tested using numerical simulations to generate the discrete waypoints and no implementation or consideration of low-level agent dynamics is done. In [7] the algorithm is extended to 3-D space. There, they transform arbitrary shaped obstacles using 24 simple convex polyhedrons to simpler shaped ones to simplify computational complexity. In a recent study, Uzol et al. [8] use panel method to develop a target tracking methodology for a swarm of UAV’s using unsteady streamline patterns in real environments. They use the map of a real city (from Google maps) but design the panels manually off-line. Obstacle avoidance is guaranteed by following the streamlines generated, while collision avoidance between the agents is provided by setting a repulsive singularity element at each agent. The algorithm is tested using numerical simulations. In the above studies only [1] considers implementation/testing on real robotic systems. Howeveri as mentioned above, they consider only circular obstacles. Similarly, the works in [5], [6], [7], and [8], which consider complex shaped obstacles and panel method do not consider implementation on real robotic system. This paper combines the ideas from the above studies to implement the potential flow concept on real robotic system composed of differentially driven non-holonomic robots. The robots navigate in an unknown environment and use their laser scanners for sensing and obstacle detection. Based on the sensed data the panel method is used to solve in real-time for the flow lines to generate safe path to the target. When the robots encounter new obstacles (which they were unable to detect before because they were too far or the obstacles were occluded by other objects/obstacles), they re-solve for the streamlines in real-time to re-plan their paths. Moreover, we use potential functions in order to keep cohesiveness or to achieve and keep a predefined formation in the group during the motion. The algorithm is implemented in a laboratory environment with real robots and real complex shaped obstacles. This work is build on an earlier work in [9] where implementation was performed on a different robotic setup under the assumption that the map of the environment is known a priori
- مقاله درمورد ناوبری با استفاده از روش پانل بلادرنگ برای اجرای کنترل ساخت ربات
- پیاده سازی کنترل ساخت و ساز ربات و ناوبری با استفاده از روش پانل زمان واقعی
- پروژه دانشجویی ناوبری با استفاده از روش پانل بلادرنگ برای اجرای کنترل ساخت ربات
- اجرای کنترل صف آرایی ربات و جهت یابی با متد پنل زمان واقعی
- پایان نامه در مورد ناوبری با استفاده از روش پانل بلادرنگ برای اجرای کنترل ساخت ربات
- تحقیق درباره ناوبری با استفاده از روش پانل بلادرنگ برای اجرای کنترل ساخت ربات
- مقاله دانشجویی ناوبری با استفاده از روش پانل بلادرنگ برای اجرای کنترل ساخت ربات
- ناوبری با استفاده از روش پانل بلادرنگ برای اجرای کنترل ساخت ربات در قالب پاياننامه
- پروپوزال در مورد ناوبری با استفاده از روش پانل بلادرنگ برای اجرای کنترل ساخت ربات
- گزارش سمینار در مورد ناوبری با استفاده از روش پانل بلادرنگ برای اجرای کنترل ساخت ربات
- گزارش کارورزی درباره ناوبری با استفاده از روش پانل بلادرنگ برای اجرای کنترل ساخت ربات